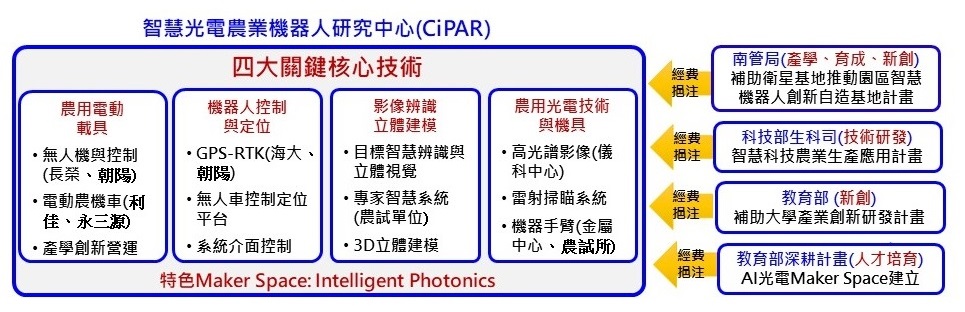
智慧影像(AI Imaging) + 光電系統(Photonic System)
機電控制(Mechatronic Control) +農業應用(Agricultural Applications)跨領域研發
技術核心主要加入有量產農用載具實績的廠商共同合作,中心專注於載具綠能與智慧化、取代人力重覆行為規劃完整路徑後可無人自駕的機器人控制與定位、由農試單位提供專家系統了解各物種特性,再依其特性加入影像辨識與立體建模精準辨識物件位置運用干預性的機器手臂或雷射系統經由物件位置達到需求功能的農用光電技術與機具,以結合各領域中的專家智慧達到深度及廣度最大化。
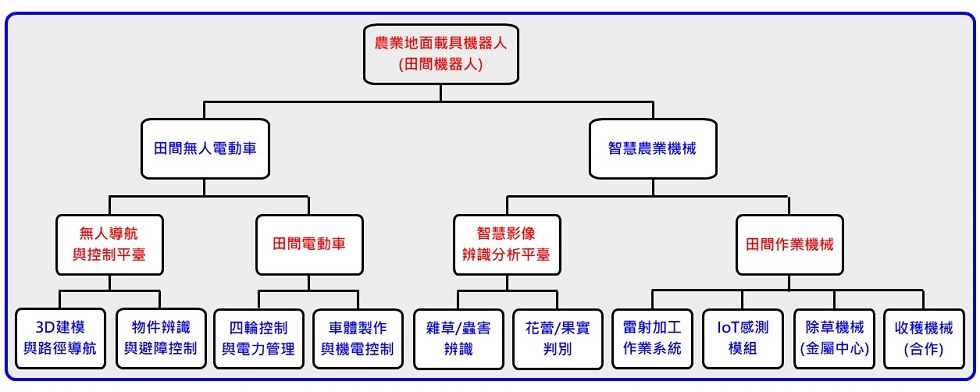
田間機器人:主要以田間無人電動車自動巡視場域加入病蟲害防治及精緻化農業為主體的智慧農業機械,利用影像與資料收集分析預測再經由機械器具進行作業。
Ø 田間無人電動車
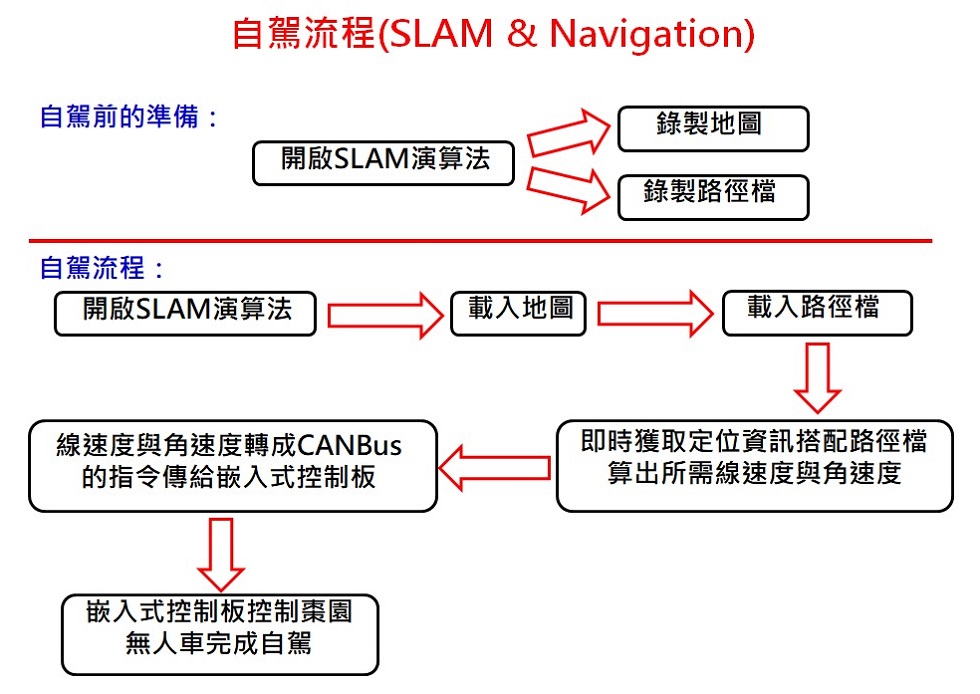
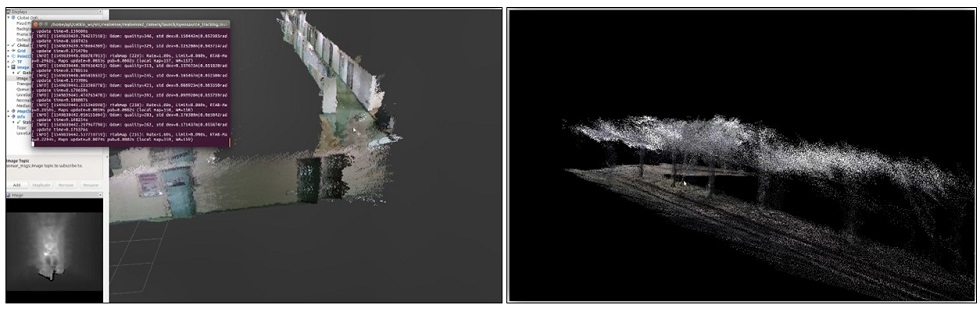
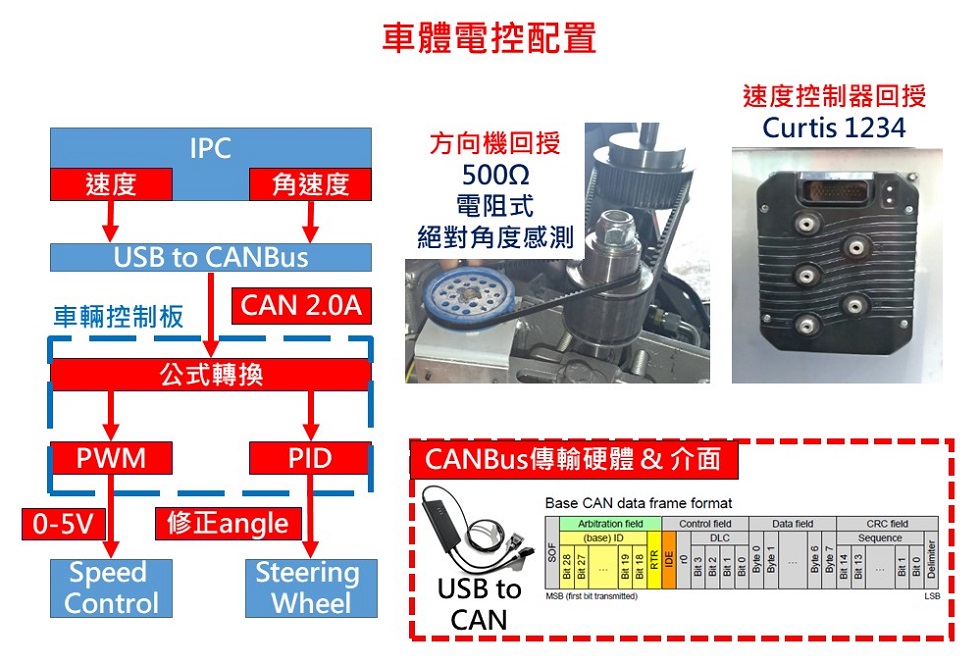
田間電動車進行無人自動駕駛,運用影像感測器建構周圍農地3D形貌,經由同步定位與地圖建構(SLAM)技術規劃出行走路徑,由機電控制系統模組驅動車體沿著規劃路徑行走。為顧及農地自駕安全,開發物件辨識系統即時辨別障礙物,並使用避障技術控制車體繞開障礙物進而回到原路徑繼續前進。此外為了使電動車更能適應田間崎嶇路況及各式寬度深度的田畦環境,研發可調式模組化設計及四輪獨立控制技術使車體以超高自由度移動。
Ø智慧農業機械
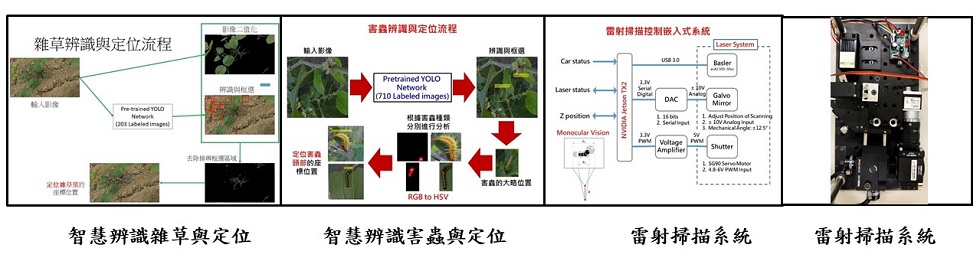
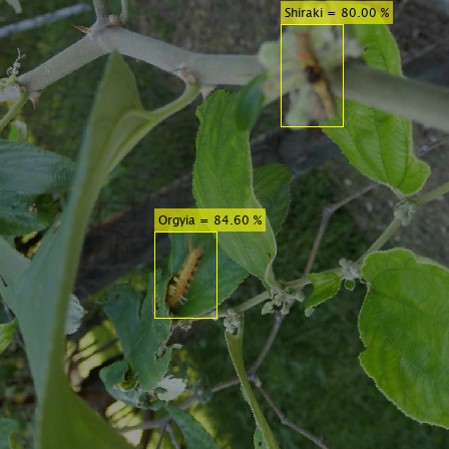
運用深度學習技術與專家系統建構農業知識庫並將深度學習影像辨識技術實現於嵌入式系統中,在高速運算速度達到即時深度學習運算的辨識,現階段已完成害蟲與雜草的資料庫建構,於此二項物件偵測上有不錯的成績,進行中為全齡害蟲、多樣的雜草知識庫與果實疏果知識庫。另經由RS485的通訊串聯干預型同軸校正後的雷射掃描系統,達到快速有效解決害蟲問題。另有成熟使用大數據分析的IoT模組,全天候於田間採集數據,即時回傳雲端平台分析,有效預測真菌病害(灰黴病、根腐病、花腐病、稻熱病及白粉病)、精準施肥與抑制蟲害生長環境,以達到預期防治與有效防治。
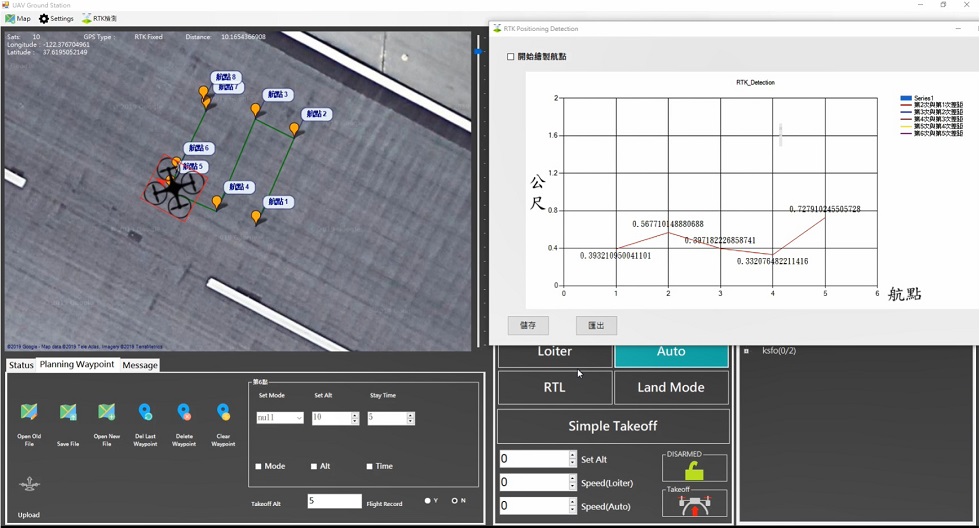
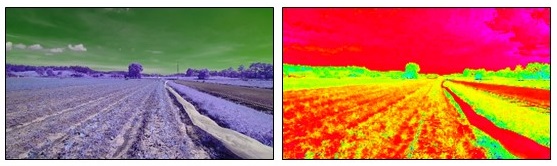
無人機精密定位與經濟型高光譜結合:為了解植物生長與果實成熟狀況,使用無人機搭載經濟型高光譜儀器,取得歸一化植被指數或光譜影像後,由後台解析相關數據並與無人機的精密定位系統確定物件位置,以利後續採收車路線規劃與收成。
關鍵技術開發是中心的核心價值所在,為了拉近與市場面的距離,於實作場域上實際運作,經由問題的發現與改良增加實用性,再加上產學小組市場需求分析,了解客戶需求確定研發方向與需求市場的差異最小化。四套系統包含可模組化的六項原型:

Ø無人電動農機車
環保與人力是現行農機車的二個缺點,因此我們將柴油引擎改為電動化並依地形及任務不同設計模組化架構可依需求變更並加入智能的行駛,使得人不用下田就有田間無人電動車幫忙巡邏。
ØAI雷射病蟲害疏果系統
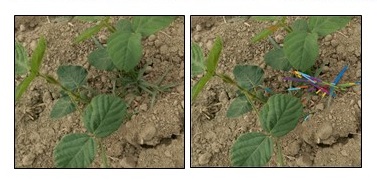
一般為解決蟲害問題會使用噴藥的方式省時省力卻不健康,使用有機農法後用人工抓蟲又太費時,為此以深度學習為主軸發展物件辨識系統,不止是偵測位置更是定位出蟲的頭部以最有效的方式經由雷射系統加工消除蟲害。
Ø經濟型高光譜系統
高光譜相機主要運用於衛星影像中,為使技術能運用於農業面,開發經濟型模組並架設於無人機拍攝作物,再經由後台分析確定農作物的生長狀況,以確定作物成熟度。
ØAI除草系統
田間的蟲與草生生不息,我們運用即時深度學習的技術於嵌入式系統中,偵測並定位雜草位置由機械手臂進行加工,針對雜草莖的位置有效及快速的完成任務。